Nachi
Nachi MZ07 The World’s Fastest Lightweight Compact Robot

Manufacturer: NACHI
Model: MZ07
Features
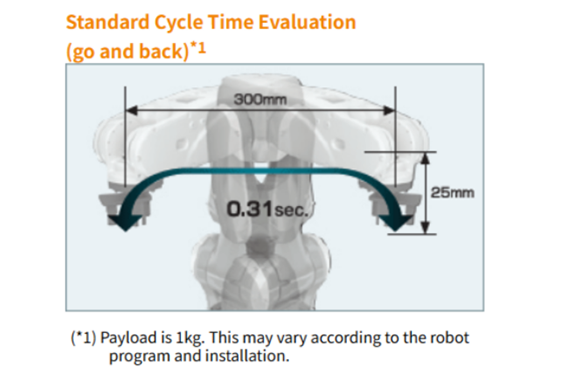
High-speed motions
The world’s fastest speed specification contributes to improved productivity.
Wiring through a hollow wrist
Improves practicality by reducing the risk of interference between the wiring and nearby equipment, and enables easy entry into confined areas.
Supports a wide range of applications
In addition to the standard specification, visual, additional axis and force sensor specifications are available, satisfying all needs at a production worksite.
Controller
CFD Controller
Top Perform High Speed*1
Maximum speed of each axis is the top in this class
Contributing to improvement of productivity by high speed
| Axis | MZ07-01 | Conventional model |
|---|---|---|
| J1 | 450°/s | 263°/s |
| J2 | 380°/s | 240°/s |
| J3 | 520°/s | 300°/s |
| J4 | 550°/s | 300°/s |
| J5 | 550°/s | 300°/s |
| J6 | 1000°/s | 480°/s |
 Smart Cable Routing
Smart Cable Routing
Cable and tubes can be routed through hollow wrist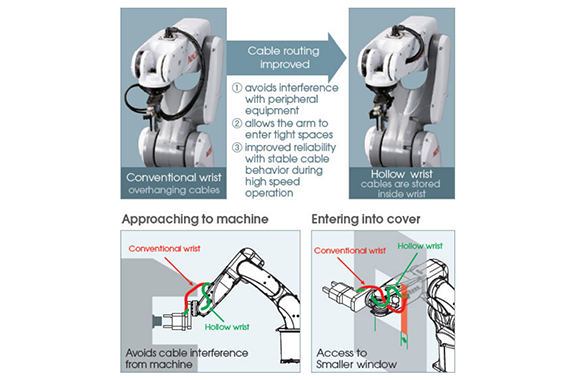
Operating range
MZ07/07L/10 Robot dimensions and Working envelope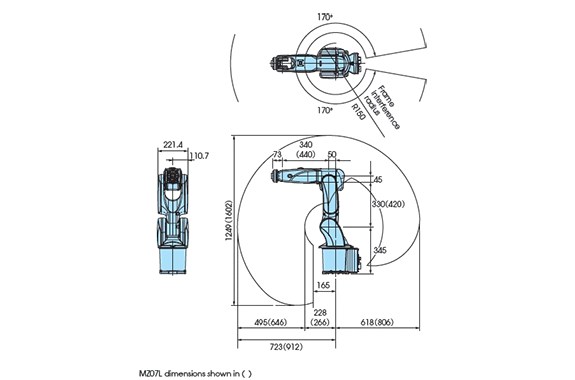 Service Taps
Service Taps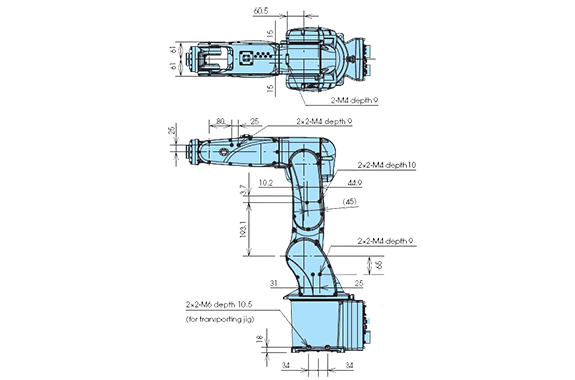 Wrist dimensions
Wrist dimensions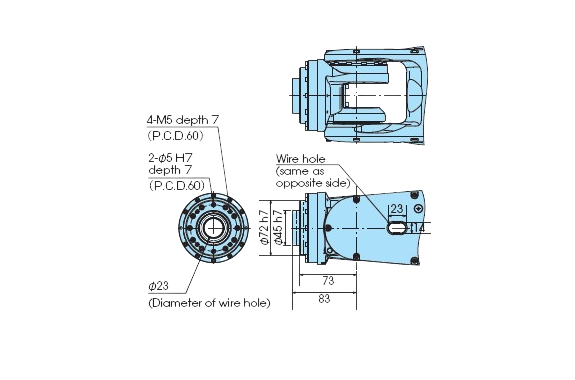 Robot base dimensions
Robot base dimensions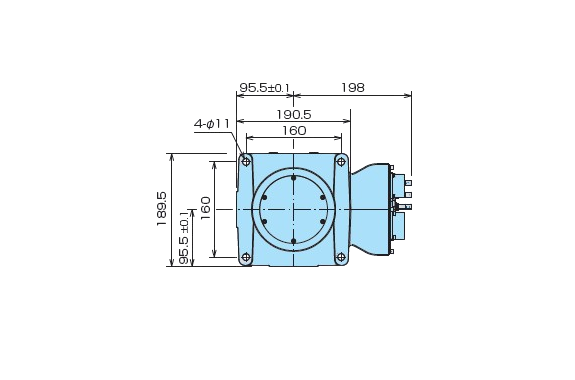
The specifications are subject to changes without notice.
In case that an end user uses this product for military purpose or production of weapon. this product may be liable for the subject of export restriction stipulated in the Foreign Exchange and Foreign Trade Law. Please go through careful investigation and necessary formalities for export.
Robot dimensions and Working envelope MZ03EL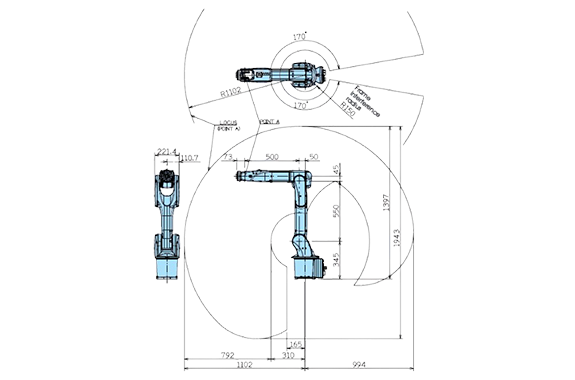 Wrist dimensions
Wrist dimensions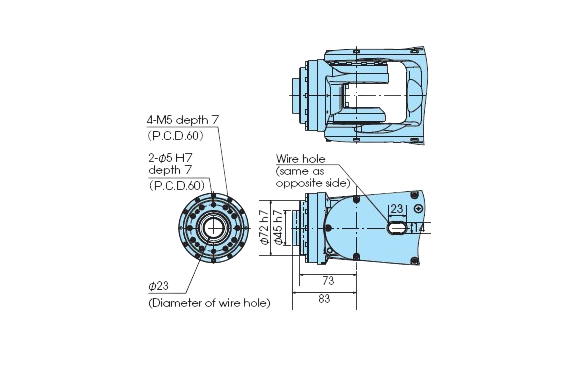 Robot base dimensions
Robot base dimensions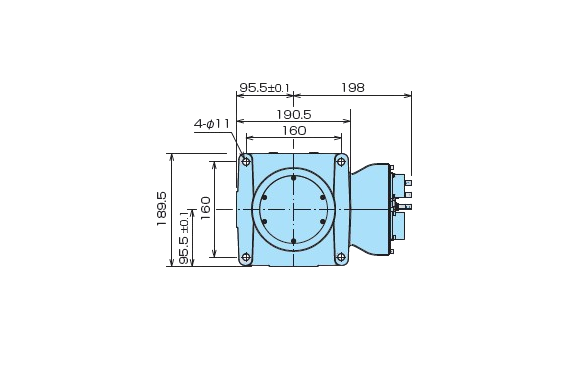 The specifications are subject to changes without notice.
The specifications are subject to changes without notice.
In case that an end user uses this product for military purpose or production of weapon. this product may be liable for the subject of export restriction stipulated in the Foreign Exchange and Foreign Trade Law. Please go through careful investigation and necessary formalities for export.
Specification
| Robot model | MZ07-01 (MZ07P- 01) | MZ07L-01 (MZ07LP- 01) | MZ03EL-01 | MZ10-01 | ||
| Construction | Articulated | |||||
| Number of axis | 6(5) | 6 | ||||
| Drive system | AC Servodrive | |||||
| Arm Max. Working | JI | Swivel | ±2.97rad (±170°) | |||
| J2 | Forward/ Backward | -2.36 to +1.40rad (-135°to +80°) | ||||
| J3 | Upward/ Downward | -2.37 to +4.71rad (-136° to +270°) | -2.43 to +4.71 rad (-139° to +270°) | -2.71 to +4.71rad (-155° to +270°) | -2.37 to +4.71rad (-136° to +270°) | |
| Wrist | J4’3 | Rotation 2 | ±3.32rad (±190°) | |||
| J5 | Bend | ±2.09rad (±120°) | ||||
| J6 | Rotation 1 | ±6.28rad (±360°) | ||||
| Arm Max. | JI | Swivel | 7.85rad/s (450°/s) | 5.24rad/s (300°/s) | ||
| J2 | Forward/ Backward | 6.63rad/s (380°/s) | 4.89rad/s (280°/s) | 4.01rad/s (230°/s) | 4.36rad/s (250°/s) | |
| J3 | Upward/ Downward | 9.08rad/s (520°/s) | 6.28rad/s (360°/s) | |||
| Speed Wrist | J4’3 | Rotation 2 | 9.60rad/s (550°/s) | 7.85rad/s (450°/s) | ||
| 35 | Bend | 9.60rad/s (550°/s) | 5.93rad/s (340°/s) | |||
| J6 Rotation 1 | 17.5rad/s (1000°/s) | 12.22rad/s (700°/s) | ||||
| Max. Pay load Wrist | 7kg | 3.5kg | 10kg | |||
| J4’3 | Rotation2 | 16.6Nm | 6.0N-m | 17.9Nm | ||
| Allowable Static Loading Torque | J5 | Bend | 16.6Nm | 6.0N-m | 17.9Nm | |
| J6 | Rotation 1 | 9.4Nm | 2.9N-m | 10.4N-m | ||
| Max. Allowable | J4*3 | Rotation2 | 0.47kg-m2 | 0.12kg-m2 | 0.47kgm2 | |
| Moment of | J5 | Bend | 0.47kg-m2 | 0.12kg-m2 | 0.47kgm2 | |
| Inertia’1 | J6 | Rotation 1 | 0.15kgm2 | 0.03kg-m2 | 0.15kgm2 | |
| Position Repeatability’2 | ±0.02mm | ±0.03mm | ||||
| Ambient Conditions | 0 to 45°C | |||||
| Installation | Floor / Wall / Tilted / Inverted mount | Floor / Inverted mount | ||||
| Robot Mass | 36kg *5 | 38kg *5 | 39kg | 36kg | ||
| Max. Reach | 723mm | 912mm | 1102mm | 723mm | ||
| Dust Proof, Drip Proof | IP67 | |||||
1[rad]=180/p[], 1[Nm]=1/9.8[kgfm]
(*1) Note that the allowable moment of inertia of wrist varies with the wrist load conditions.
(*2) JIS B 8432 compliant.
(*3) MZ07P-01 and MZ07LP-01 don’t have J4 axis.
(*4) The “Max. speed” in this table is the available maximum value and will change depending on the workprogram and the wrist load condition.
(*5) Wall mount Bottom Connection Type +6kg.Bottomr Connection Type +8kg.
Related Products






REQUEST QUOTATION
PAYMENT

LINK



