Nachi
Nachi MC400L Heavy Duty Robots

Manufacturer: NACHI
Model: MC400L
Features
Hollow wrist structure
Avoiding interference of cables with peripheral equipment.
Improved reliability of cables due to its stable behavior with wrist movement.
High-speed motion
Top level performance in its class.
Powerful Wrist
Easy handling for large work-pieces due to the large wrist capacity.
A work-piece of large moment of inertia is also available.
Advanced applicability
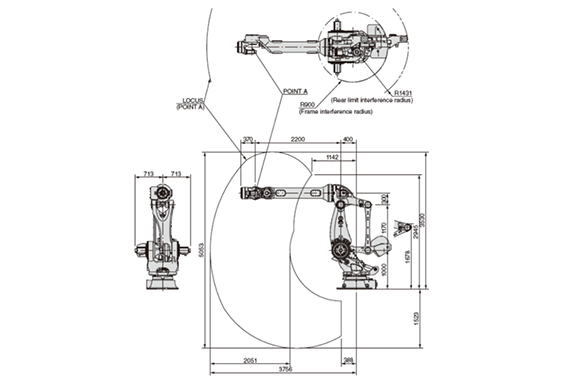
Wide envelope.
5 meter vertical stroke.
Application signals are standard
2 ports for air, 40 application signals, DeviceNet cable, LAN cable.
Operating range
 (*1) The specifications are subject to changes without notice.
(*1) The specifications are subject to changes without notice.
(*2) In case that an end user uses this product for military purpose or production of weapon, this product may be liable for the subject of export restriction stipulated in the Foreign Exchange and Foreign Trade Law. Please go through careful investigation and necessary formalities for export.
Specification
| Item | MC400L-01 |
|---|---|
| Structure | Articulated |
| Number of axes | 6 |
| Drive system | AC servo system |
| Max. operating envelope | |
| J1 (Swivel) | ±3.14 rad (±180°) |
| J2 (Horizontal) | -1.83 ~ +1.05 rad (-105° ~ +60°) |
| J3 (Vertical) | -2.27 ~ +0.52 rad (-130° ~ +30°) |
| J4 (Rotation 2) | ±3.67 rad (±210°) |
| J5 (Bend) | ±2.09 rad (±120°) |
| J6 (Rotation 1) | Max. ±6.28 rad (±360°) Initial setting: ±3.67 rad (±210°) (*4) |
| Max. velocity | |
| J1 (Swivel) | 1.57 rad/s (90°/s) |
| J2 (Horizontal) | 1.57 rad/s (90°/s) |
| J3 (Vertical) | 1.57 rad/s (90°/s) |
| J4 (Rotation 2) | 1.92 rad/s (110°/s) |
| J5 (Bend) | 1.92 rad/s (110°/s) |
| J6 (Rotation 1) | 3.14 rad/s (180°/s) |
| Payload | Wrist: 400 kg Forearm (*1): Max. 50 kg |
| Allowable static load torque for wrist | |
| J4 (Rotation 2) | 3450 N·m |
| J5 (Bend) | 3450 N·m |
| J6 (Rotation 1) | 1725 N·m |
| *Allowable moment of inertia for wrist (2) | |
| J4 (Rotation 2) | 600 kg·m² |
| J5 (Bend) | 600 kg·m² |
| J6 (Rotation 1) | 400 kg·m² |
| *Position repeatability (3) | ±0.09 mm |
| Installation | Floor |
| Ambient conditions | Temperature: 0–45°C (*5) Humidity: 20–85% RH (without condensation) Vibration: ≤0.5G (4.9 m/s²) |
| Robot mass | 3,050 kg |






REQUEST QUOTATION
PAYMENT

LINK



