Kitagawa Corporation.
Kitagawa Fanuc CRX Series Robot Accessory

Manufacturer: Kitagawa Corporation.
Model: Fanuc CRX Series
Feature:
High gripping force enables stable transportation of heavy workpieces.
Highly rigid body structure realizes high repeatability.
Lightweight and compact design that does not limit robot payload.
The kit comes with all the peripheral devices (adapter, air unit, and jaws) necessary for installing a gripper, which reduces the time and effort required to select the devices.
How to order
Gripper mounting set
Model: NTS3 11-C
This adapter connects a robot and a gripper.
The application suits collaborative robots.
The size is 11.
The series is NTS3.
The model follows the JIS B1610-1-50-4-M6 standard.
Air unit
Model: HP-A188
This air unit operates the gripper using a solenoid valve and push-in fittings.
Customers must prepare any additional equipment not included in this set.
Base jaws
Model: NTS-BJ 3 11-C
This base jaw holds the child jaw.
The size is 11.
The part name is Base jaw.
The series is NTS.
Customers must refer to the catalog, design their setup, and select appropriate child claws or base jaws if not included.
The gripper itself does not come with the sets listed above.
Specifications
| Model | Jaw stroke (diameter) (mm) | Gripping force F (Note 2) | Repeatability (mm) | Mass (kg) | Air consumption (cm3/round trip) | Working air pressure (MPa) | Operating temperature (℃) | ||
|---|---|---|---|---|---|---|---|---|---|
| Mearsurement distance (Note 1) L(mm) | O.D. Gripping (N) | I.D. Gripping (N) | |||||||
| NTS311 | 20 | 20 | 1810 | 1930 | ±0.01 | 1.21 | 112 | 0.2~0.8 | 5~60 |
Note:
The measurement distance is the distance from the top surface of the master jaw to the gripping centre.
Value at supply air pressure 0.6 MPa.
Applicable models will be added in the future.
Gripping force
The gripping force, F is a product of the actual gripping force per jaw, F1 and the number of jaws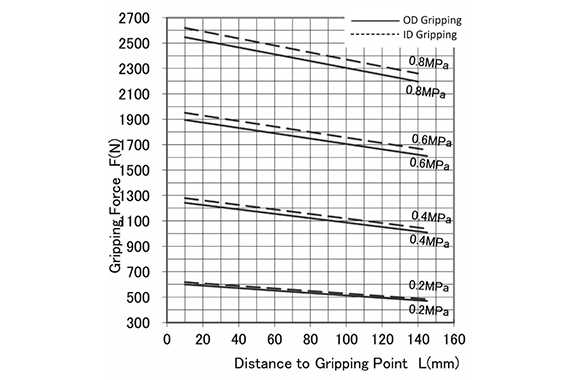
NTS311
The gripping force will be calculated by the gripper model, air pressure, and other gripping conditions.
Related Products



REQUEST QUOTATION
PAYMENT

LINK



