Kitagawa Corporation.
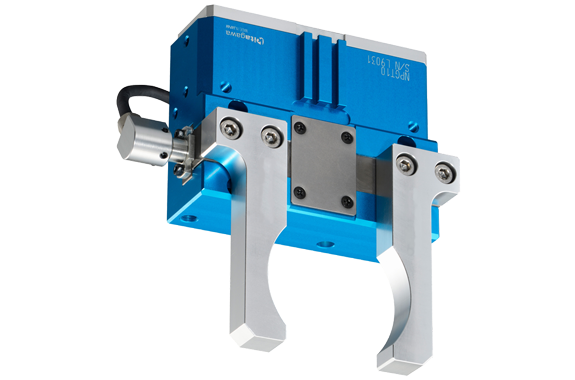
Kitagawa NPGT-S Series Robot Hand
Manufacturer: Kitagawa Corporation.
Model: NPGT_S series
Feature:
Possible to measure gripping length
The thin body enables flexible system design.
The high restoration accuracy by utilizing workholding technology of lathe chucks.
NPGT achieves higher gripping force than the similar stroke model.
Specification:
| Model | Jaw stroke in diameter (mm) | Gripping Force F | Repeatability (mm) | Mass (kg) | Air Consumption per reciprocating (cm3) | Air Pressure (MPa) | Operating Temperature (℃) | ||
|---|---|---|---|---|---|---|---|---|---|
| Measurement Distance L (mm) | OD Gripping (N) | ID Gripping (N) | |||||||
| NPGT08S | 16.6 | 10 | 600 | 500 | ±0.008 | 0.79 | 34 | 0.2~0.8 | 5~60 |
| NPGT10S | 20.8 | 10 | 1000 | 860 | ±0.008 | 1.25 | 64 | 0.2~0.8 | 5~60 |
| NPGT12S | 26.4 | 10 | 2000 | 1700 | ±0.008 | 2.45 | 152 | 0.2~0.8 | 5~60 |
Note :
The measurement distance is the distance from the top surface of the master jaw to the gripping centre.
Value at supply air pressure 0.6 MPa.
The above specifications are the same as those of non-scale model (NPGT).
Related Products






REQUEST QUOTATION
PAYMENT

LINK



