Kitagawa Corporation.
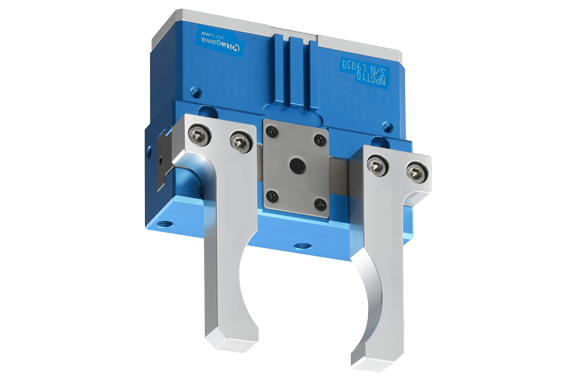
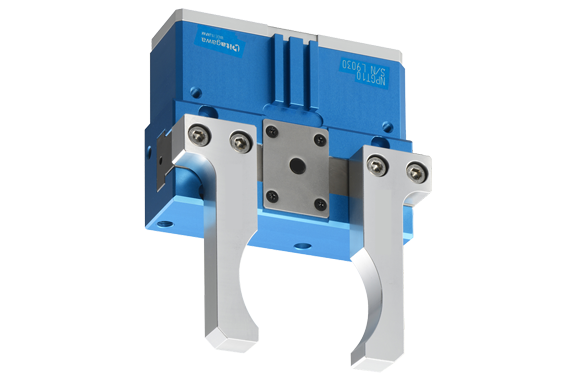
Kitagawa NPGT Series Robot Hand
Manufacturer: Kitagawa Corporation.
Model: NPGT series
Feature:
The thin body enables flexible system design. In addition, the high restoration accuracy is achieved by utilizing the workholding technology of lathe chucks. As a result, NPGT achieves higher gripping force than similar stroke models. Furthermore, a variety of options are available, including several detection methods and models with a through hole (NPGT10, NPGT12, NPGT16).
How to order
 Size: 08, 10, 12, 16
Size: 08, 10, 12, 16
NBR seal
Thin 2-jaw parallel gripper
Note:
Install a check valve in the air-pressure circuit to prevent the gripper from releasing the workpiece in the event of air pressure drop. Mount the reed switches on the grooves along the outer periphery of the product to detect the jaw stroke. If you choose to use proximity switches for direct stroke detection, purchase and install the appropriate proximity switch brackets separately.
Specification:
| Model | Jaw stroke in diameter (mm) | Gripping Force F | Repeatability (mm) | Mass (kg) | Air Consumption per reciprocating (cm3) | Air Pressure (MPa) | Operating Temperature (℃) | ||
|---|---|---|---|---|---|---|---|---|---|
| Measurement Distance L (mm) | OD Gripping (N) | ID Gripping (N) | |||||||
| NPGT08 | 16.6 | 10 | 600 | 500 | ±0.008 | 0.79 | 34 | 0.2~0.8 | 5~60 |
| NPGT10 | 20.8 | 10 | 1000 | 860 | ±0.008 | 1.25 | 64 | 0.2~0.8 | 5~60 |
| NPGT12 | 26.4 | 10 | 2000 | 1700 | ±0.008 | 2.45 | 152 | 0.2~0.8 | 5~60 |
| NPGT16 | 32.6 | 10 | 2800 | 2650 | ±0.008 | 4.60 | 524 | 0.2~0.8 | 5~60 |
Note :
The measurement distance is the distance from the top surface of the master jaw to the gripping centre.
Value at supply air pressure 0.6 MPa.
Related Products





REQUEST QUOTATION
PAYMENT

LINK



