Kitagawa Corporation.
Kitagawa NTB series Robot Hand

Manufacturer: Kitagawa Corporation.
Model: NTB series
Feature:
Swarf protection and maintenance improved
High gripping force for stable gripping of heavy work piece
Lightweight and compact body not limiting load capacity of robot
New mounting style for smaller protrusion compared with conventional models
Improved gripping accuracy due to highly rigid body
Specification:
| Model | Jaw Stroke Diameter (mm) | Through-hole Diameter (mm) | Gripping Force | Repeatability (mm) | Mass (kg) | Air Consumption per reciprocating (cm3) | Air pressure (MPa) | Operating Temperature (℃) | ||
|---|---|---|---|---|---|---|---|---|---|---|
| Measurement Distance L(mm) | OD Gripping (N) | ID Gripping (N) | ||||||||
| NTB309 | 12 | 14.3 | 10 | 1110 | 1270 | ±0.015 | 0.70 | 38.0 | 0.2~0.8 | 5~60 |
| NTB311 | 16 | 25 | 20 | 1510 | 1750 | ±0.015 | 1.20 | 80.4 | 0.2~0.8 | 5~60 |
| NTB313 | 20 | 29.9 | 20 | 3580 | 3750 | ±0.015 | 2.10 | 190.1 | 0.2~0.8 | 5~60 |
| NTB317 | 25 | 50 | 20 | 7440 | 9000 | ±0.02 | 7.50 | 465.1 | 0.2~0.8 | 5~60 |
Note:
The measurement distance is the distance from the top surface of the master jaw to the gripping centre.
Value at supply air pressure 0.6 MPa.
Gripping force
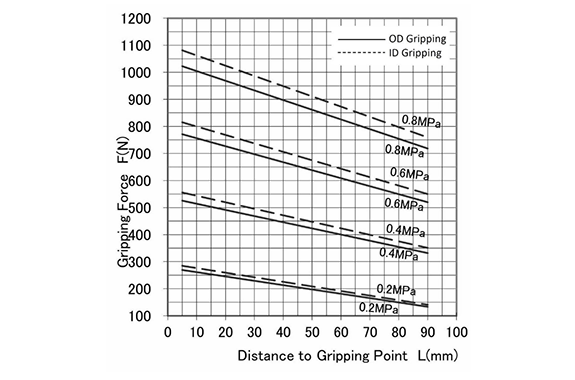 The gripping force, F is a product of the actual gripping force per jaw, F1 and the number of jaws
The gripping force, F is a product of the actual gripping force per jaw, F1 and the number of jaws
NTB309
NTB311
NTB313
NTB317
The gripping force will be calculated by the gripper model, air pressure, and other gripping conditions.
Related Products





REQUEST QUOTATION
PAYMENT

LINK



