Nachi
Nachi CZ10 Slim Collaborative Robot

Manufacturer: NACHI
Model: CZ10
Features
Collaborative people-friendly design
Nachis new robot, CZ10, has several people-friendly functions and structures. Makes it easier to install a robot with various applications. User-friendly Design
User-friendly Design
Pinch points and sharp edges eliminated for safer human interaction. Application
Application
Mutual harmony with people
Operating range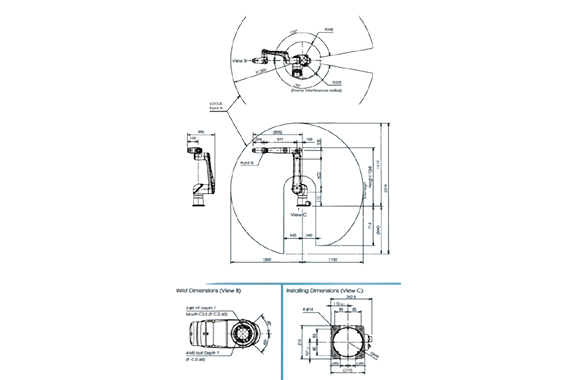 Specification
Specification
Item | Specification | |
Robot type | CZ10-01 | |
Number of axis | 6 | |
| Drive system | AC servo motor | |
| Max. working envelope | Axis 1 | ±2.96rad (±170°) |
| Axis 2 | -1.30~+3.92rad (-75—+2250) | |
Axis 3 | -1.34~+3.96<ad (-77~+227°) | |
| Axis 4 | ±3.14rad (±180°) | |
Axis 5 | ±2.96<ad (±170°) | |
| Axis 6 | ±6.28rad (±360°) | |
Max. speed *’ | Axis 1 | 2.09rad/s (1207s) |
| Axis 2 | 2.09rad/s (1207s) | |
Axis 3 | 3.14rad/s(1807s) | |
| Axis 4 | 3.14rad/s(1807s) | |
Axis 5 | 3.14rad/s(1807s) | |
| Axis 6 | 3.14rad/s(1807s) | |
Max. payload | Wrist | 10kg |
| Allowable static load torque | Axis 4 | 25.9N-m |
Axis 5 | 25.9N«m | |
| Axis 6 | 5.9N«m | |
Allowable moment of inertia | Axis 4 | 0.75kg’m2 |
| Axis 5 | 0.75kg’m2 | |
Axis 6 | 0.08kg Tn2 | |
| Position repeatability *s | ±0.1 mm | |
Max. reach | 1300mm | |
| Air piping | 04×1 | |
I/O on the wrist part | Dlx4,DOx3 | |
| Installation | Floor/lnverted | |
Ambient conditions | Temperature: 0~45°C *4 Humidity: 20~85%RH (No dew condensation) Vibration to the installation face:0.5G (4.9m/s2) or less | |
| Dust-proof Drip-proof performance | IP54 equivalent (dust and drain proof-type) | |
Robot mass | 61kg | |
| Safety certification | Conforming to ISO 10218-1 * | |
1 rad = 180/π, 1 Nm = 1/9.8 kgfm
1 “Max. speed” is the maximum value and varies with work program and wrist load.
2 The allowable moment of inertia of the wrist changes with load conditions.
3 Based on JIS B8432.
4 The robot’s range of motion is limited when invert-mounted.
5 Install the robot below 1,000m altitude; operating temperature depends on height.
6 Use only in applications where liquids do not deteriorate the seal material. Wire harness: IP54, controller: IP20.






REQUEST QUOTATION
PAYMENT

LINK



