Nachi
Nachi EZ03 Wing Slicer Type EZ Series

Manufacturer: NACHI
Model: EZ03
Features
 Downsizing the equipment
Downsizing the equipment
Installation of the inverted mount provides space saving for equipment layout.
High speed operation with the shortest path
Thanks to its slim arm, high speed operation is possible. Also inverted mounting allows the robot to travel the shortest path.
Complicated operations can be performed (6-axis model:to be released in this summer)
More complicated operations such as insertion from an angle, change of orientation in an assembly process and grinding/finishing are possible.
Operating envelope
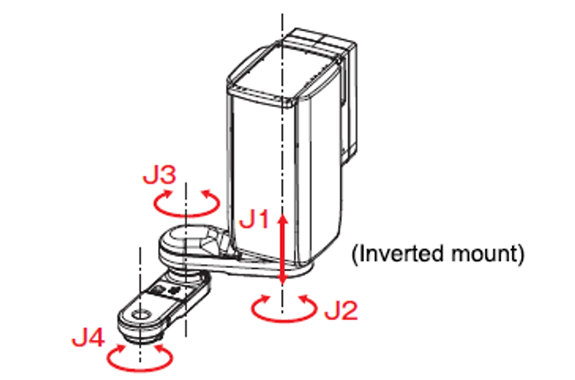
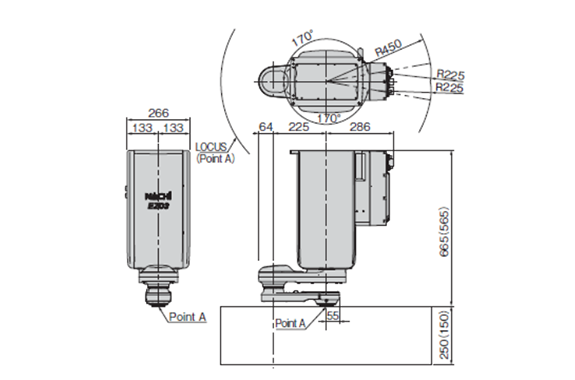
EZ03V4-02-4525 (Inverted mount)
The values in ( ) are for EZ03V4-02-4515.
EZ03F4-02-5525 (Floor mount)
The values in ( ) are for EZ03F4-02-5515.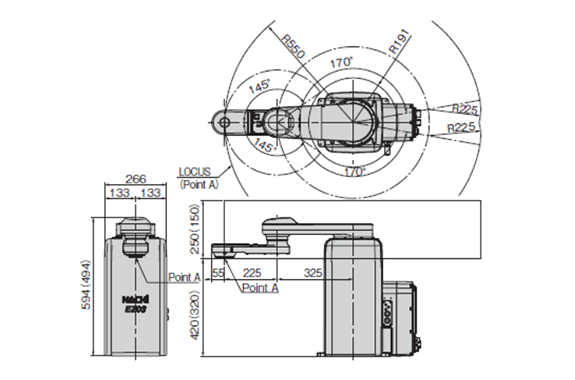
The specifications are subject to changes without notice.
In case that an end user uses this product for military purpose or production of weapon. this product may be liable for the subject of export restriction stipulated in the Foreign Exchange and Foreign Trade Act. Please go through careful investigation and necessary formalities for export.
Specification
Robot model EZ03 V 40-02-00
1. EZ series
2. Payload (03)
3. Installation: V = Inverted, F = Floor
4. Number of axes: 4
5. IP: D = IP65, blank = standard (IP20)
6.Version
7.Maximum reach (input the first two digits): 450 – 550 (45, 55)
8. Amount of Z-axis movement (input the first two digits): 150 – 250 (15, 25)
| Robot model | EZ03V4-02-4525 | EZ03V4-02-4515 | EZ03F4-02-5525 | EZ03F4-02-5515 | |
| Structure | Horizontal articulated | ||||
| Number of axes | 4 | ||||
| Drive system | AC servo system | ||||
| Max. operating envelope | J1 | 250mm | 150mm | 250mm | 150mm |
| J2 | ±170° | ||||
| J3 | ±180° | ±145° | |||
| J4 | ±360° | ||||
| Max. velocity*5 | J1 | 1400mm/s | 1200mm/s | 1400mm/s | 1200mm/s |
| J2 | 45C | % | |||
| J3 | 720% | ||||
| J4 | 2400% | ||||
| Payload | 2 kg (3kg) | ||||
| Allowable moment of inertia for wrist*1 | J4 | 0.05kgm2 (0.005 kg-rn2 rated) | |||
| Position repeatability*2 | ±0.014mm | ||||
| Max. reach | 450mm | 550mm | |||
| Air piping | 06×2 | ||||
| Application wirings | 10 wires | ||||
| Installation | Inverted mount | Floor mount | |||
| Ambient conditions | Ambient temperature: 0~45°C*3 Ambient humidity: 20~85%RH (without condensation) Vibration: Not more than 0.5G (4.9m/s2) | ||||
| Environmental conditions’4 | IP20, IP65 (Option) | ||||
| Noise level*6 | 70dB | ||||
| Robot mass | 42kg | 43kg | |||
1 rad = 180/π, 1 Nm = 1/9.8 kgfm
Explosion-proof version is not available
1 The allowable moment of inertia of the wrist changes with the wrist’s load conditions
2 This value conforms to JIS B 8432
3 The permitted height is no higher than 1,000m above sea level. If used at a higher altitude, the permitted temperature will be affected
4 Do not use fluids that cause the deterioration of sealants, such as gasoline-based cutting fluids, chlorine, alkali, acids, and organic solvents
5 The maximum velocity in the chart is the maximum value. This value may change depending on work programs and wrist load conditions
6 The A-weighted equivalent sound level is measured according to JIS Z 8737-1 (ISO 11201) while operating at maximum speed with the rated load





REQUEST QUOTATION
PAYMENT

LINK



