Nachi
Nachi MC10S Handling Robots

Manufacturer: NACHI
Model: MC10S
Features
Flexibility to support a variety of processes
Wide operating envelope, plus high water and dust proof performance (wrists and body). Compatible with variety of customer work environments.
Streamlined wiring passes through hollow wrist
Reduced risk of wiring interfering with surrounding equipment to increase applicability and make easy access to narrow space.
Compact body and powerful arm
Smallest in its class with a mere 280 mm installation width.
Operating range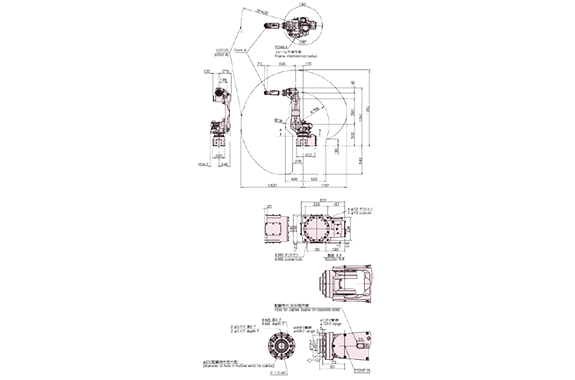
The specications are subject to changes without notice.
In case that an end user uses this product for military purpose or production of weapon. this product may be liable for the subject of export restriction stipulated in the Foreign Exchange and Foreign Trade Control Law. Please go through careful investigation and necessary formalities for export.
Specification
| Robot model | MC10S-01 | ||
| Structure | Articulated construction | ||
| Drive system | AC servo system | ||
| Number of axes | 6 | ||
| Max. operating envelope | J1 | ±3.14rad (±180°) | |
| J2 | +1.05 ~ -2.53rad (+60 ~ -145°) | ||
| J3 | +4.22 ~ -2.58rad (-242 ~ -148°) | ||
| J4 | ±3.32rad (±190°) | ||
| J5 | ±2.09rad (±120°) | ||
| J6 | ±6.28rad (±360°) | ||
| Max. velocity | J1 | 3.49rad/s (200°/s) | |
| J2 | 2.96rad/s (170°/s) | ||
| J3 | 2.96rad/s (170°/s) | ||
| J4 | 6.98rad/s (400°/s) | ||
| J5 | 6.98rad/s (400°/s) | ||
| J6 | 13.96rad/s (800°/s) | ||
| Payload | Wrist *1 | 10kg | |
| Allowable static load torque for wrist | J4 | 22N·m | |
| J5 | 22N·m | ||
| J6 | 11N·m | ||
| Allowable moment of inertia for wrist | J4 | 0.7kg·m² | |
| J5 | 0.7kg·m² | ||
| J6 | 0.2kg·m² | ||
| Max. reach | 1420mm | ||
| Position repeatability | ±0.06mm | ||
| Air piping | Ø6 × 2 | ||
| Application wirings | 10 circuits | ||
| Installation | Floor mounted, Ceiling mounted | ||
| Ambient conditions | Ambient temperature: 0~45°C Ambient humidity: 20~85% RH (without condensation) Vibration: Not more than 0.5G (4.9m/s²) | ||
| Environmental performance | Wrist has IP67 and main body has IP65 equivalent | ||
| Robot mass | 198kg | ||
1[rad] = 180/[], 1[Nm] = 1/9.8[kgfm]
This value varies from the installed position and the wrist load mass.
Note that wrist moment of inertia varies depending on wrist load conditions.
JIS B 8432 compliant.
When used at less than 1.000 m above sea level. Exceeding the allowable altitude limits the acceptable ambient temperature.
Fluids that corrode the seal material. such as organic solvents. acids. alkalis. salts and petroleum-based cutting fluids. cannot be used.




REQUEST QUOTATION
PAYMENT

LINK



