Nachi
Nachi MC350/MC280/MC470P Heavy Duty Robots

Manufacturer: NACHI
Model: MC350/MC280/MC470P
Features
Linkage-less construction is simple and compact
Simple construction has no counterweights or parallel linkage.
Compact form can be installed in small places.
Expansive operating stroke and lifting capabilities
Expansive operating stroke and lifting capabilities Plenty of wrist torque (1.7 times our existing model) easily handles large work pieces.
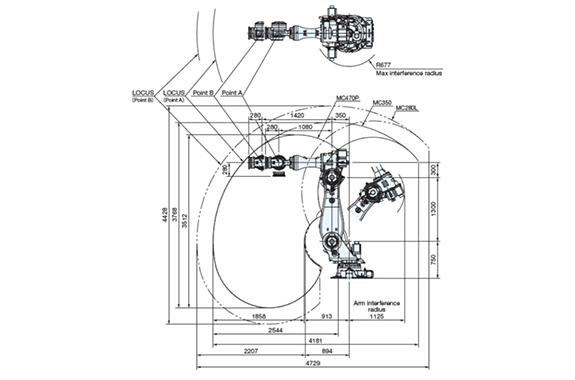
Long arm type (MC280L) has maximum reach of 3,101 mm
Super heavy lifting type (MC470P) can lift up to 470 kg (wrist must be directed downward)
High-speed motion
Lower weight and greater rigidity make it the fastest robot in its class.
Reduce cycle times by up to 15% (compared to our existing model).
Operating range
 (*1) The specifications are subject to changes without notice.
(*1) The specifications are subject to changes without notice.
(*2) In case that an end user uses this product for military purpose or production of weapon, this product may be liable for the subject of export restriction stipulated in the Foreign Exchange and Foreign Trade Law. Please go through careful investigation and necessary formalities for export.
Specification
| Item | MC350-01 | MC280L-01 | MC470P-01 |
|---|---|---|---|
| Structure | Articulated | Articulated | Articulated |
| No. of axes | 6 | 6 | 6 |
| Drive system | AC servo system | AC servo system | AC servo system |
| Max. working envelope | |||
| J1 (Swivel) | ±3.14 rad (±180°) | ±3.14 rad (±180°) | ±3.14 rad (±180°) |
| J2 (Horizontal) | -1.75 to +0.70 rad (-100° to +40°) | -2.57 to +2.27 rad (-147° to +130°) | -1.75 to +0.70 rad (-100° to +40°) |
| J3 (Vertical) | -3.14 to +2.27 rad (-180° to +130°) | -2.57 to +2.27 rad (-147° to +130°) | -3.14 to +0.61 rad (-180° to +35°) |
| J4 (Rotation 2) | ±6.28 rad (±360°) | ±6.28 rad (±360°) | ±6.28 rad (±360°) (*5) |
| J5 (Bend) | ±2.18 rad (±125°) | ±2.18 rad (±125°) | ±2.18 rad (±125°) (*5) |
| J6 (Rotation 1) | ±6.28 rad (±360°) | ±6.28 rad (±360°) | ±6.28 rad (±360°) |
| Max. speed | |||
| J1 (Swivel) | 1.83 rad/s (105°/s) | 1.83 rad/s (105°/s) | 1.83 rad/s (105°/s) |
| J2 (Horizontal) | 1.66 rad/s (95°/s) | 1.83 rad/s (105°/s) | 1.66 rad/s (95°/s) |
| J3 (Vertical) | 1.66 rad/s (95°/s) | 1.66 rad/s (95°/s) | 1.66 rad/s (95°/s) |
| J4 (Rotation 2) | 1.92 rad/s (110°/s) | 2.09 rad/s (120°/s) | 1.92 rad/s (110°/s) |
| J5 (Bend) | 1.92 rad/s (110°/s) | 2.09 rad/s (120°/s) | 1.92 rad/s (110°/s) |
| J6 (Rotation 1) | 3.14 rad/s (180°/s) | 3.49 rad/s (200°/s) | 3.14 rad/s (180°/s) |
| Payload | Wrist: 350 kg Forearm (*1): Max. 50 kg | Wrist: 280 kg Forearm (*1): Max. 25 kg | Wrist: 470 kg Forearm (*1): Max. 30 kg |
| Allowable static load torque | |||
| J4 (Rotation 2) | 2750 N·m | 1921 N·m | 2750 N·m |
| J5 (Bend) | 2750 N·m | 1921 N·m | 2750 N·m |
| J6 (Rotation 1) | 1235 N·m | 988 N·m | 0 N·m |
| Max. allowable moment of inertia | |||
| J4 (Rotation 2) | 400 kg·m² | – | 400 kg·m² |
| J5 (Bend) | 400 kg·m² | – | 400 kg·m² |
| J6 (Rotation 1) | 250 kg·m² | – | 250 kg·m² |
| Max. reach | 2771 mm | 3101 mm | 2771 mm |
| *Position repeatability (3) | ±0.09 mm | ±0.09 mm | ±0.09 mm |
| Ambient temperature | 0 to 45°C | 0 to 45°C | 0 to 45°C |
| Ambient humidity | 20–85% RH (without condensation) | Same | Same |
| Vibration | 0.5G or less | Same | Same |
| Installation | Floor mount | Floor mount | Floor mount |
| Weight | 1620 kg | 1700 kg | 1620 kg |
(*1) Load specification of number 1 arm varies according to wrist load conditions and installation position.
(*2) Note that the allowable moment of inertia of wrist varies with the wrist load conditions.
(*3) JIS B 8432 compliant.
(*4) Permitted height is not higher than 1,000 m above sea level. If used in higher place, permitted temperature is affected by height.
(*5) Software limits the downward vertical range of axis 5 to ±5°. Axis 4 can move ±360° and axis 5 can move ±125° only when the encoder correction screen or the software limit settings screen is open.
Related Products






REQUEST QUOTATION
PAYMENT

LINK



