Nachi
Nachi MZ07F/MZ07LF High Speed And High Precision Robot

Manufacturer: NACHI
Model: MZ07F/MZ07LF
Features
High-speed
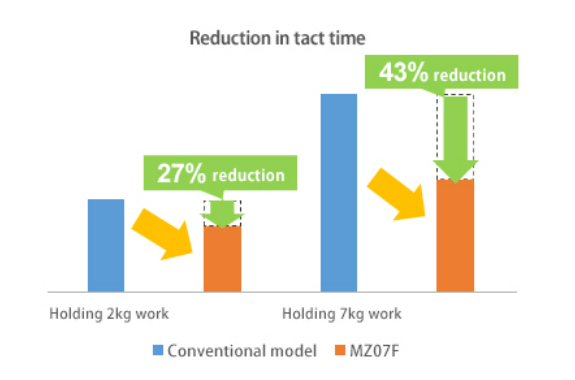
Tact time is up to 43% * shorter compared to the conventional model. MZ07F/MZ07LF can increase productivity.
High precision
High precision from high rigidity design. This helps to widen the types of applications and reduces tact times.
Hollow wrist
Smart cable and hose routing through the hollow wrist. Minimizes interference and wear.
High speed – Increased Productivity
The world’s top class speed on each axis remains unchanged. Up to 43% * shorter tact time than conventional models due to improved acceleration/deceleration performance.
 High accuracy – appliable to complex work, reduction in tact time
High accuracy – appliable to complex work, reduction in tact timeImproved pose repeatability can handle complex operations. Enhanced path accuracy for tact time reduction.
Pose repeatability : Reduced misalignment to approx. 3/4* of conventional robots
Path accuracy : Reduced misalignment to approx. 1/3* of conventional robots
Hollow wrist structure – space saving
Wiring for tooling can be routed through the hollow wrist to minimize the risk of interference with peripheral equipment, allowing flexible operation even in small spaces.

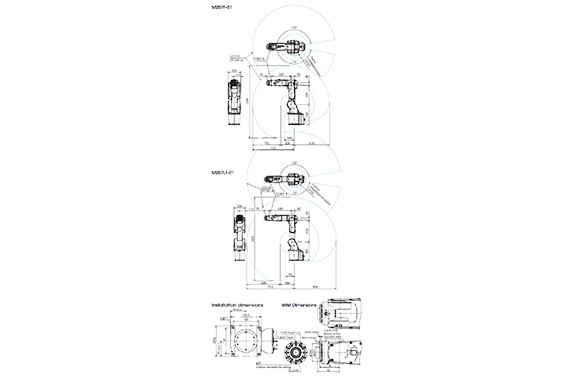
Robot dimensions and operating range
 The specifications are subject to changes without notice.
The specifications are subject to changes without notice.In case that an end user uses this product for military purpose or production of weapon. this product may be liable for the subject of export restriction stipulated in the Foreign Exchange and Foreign Trade Act. Please go through careful investigation and necessary formalities for export.
Specification
Item | Specification | ||
| Model | MZ07F-01 | MZ07LF-01 | |
| Structure | Articulated robot | ||
| Degree of Freedom | 6 | ||
| Drive System | AC Servo drive | ||
| Maximum motion range | JI | ±2.97rad (±170°) | |
J2 | -2.36-+1.40 (-135-+80°) | ||
| J3 | -2.37 -+4.71 rad (-136 -+270°) | -2.43 – +4.71rad (-139 – +270°) | |
J4 | ±3.32rad (±190°) | ||
| J5 | ±2.09rad (±120°) | ||
J6 | ±6.28rad (±360°) | ||
| Maximum Velocity’1 | JI | 7.85rad/s (4507s) | 5.24rad/s (3007s) |
J2 | 6.63rad/s (3807s) | 4.89rad/s (2807s) | |
| J3 | 9.08rad/s (5207s) | 6.28rad/s (3607s) | |
J4 | 9.60rad/s (5507s) | ||
| J5 | 9.60rad/s (5507s) | ||
J6 | 17.45rad/s (10007s) | ||
| Maximum Payload | Wrist | 7kg | |
Maximum static load torque | J4 | 16.9N-m | |
J5 | 16.9N-m | ||
J6 | 9.4N«m | ||
| Maximum moment of inertia’2 | J4 | 0.49kg*m2 | |
J5 | 0.49kg*m2 | ||
| J6 | 0.15kg«m2 | ||
Position repeatability’3 | ±0.015mm | ±0.020mm | |
| Maximum Reach | 723mm | 912mm | |
Air tubes | 06×2 | ||
| Application cables | 20 wires | ||
Installation’4 | Floor / Wall / Inclined / Inverted | ||
Installation Condition | Ambient Temperature: 0 – 45°C’5 Ambient Humidity: 20 – 85%RH (No dew or frost allowed) Vibration: < 0.5G(4.9m/s2) | ||
| Protection class’6 | IP 67 equivalent(dust-proof, moisture-resistant) | ||
Clean rating*7 | CLASS4 | ||
| Robot Mass | 41kg | 43kg | |
1 rad = 180/π, 1 Nm = 1/9.8 kgfm
Explosion-proof version not available.
1: Maximum velocity varies with operation program and wrist load.
2: Allowable wrist moment of inertia depends on load conditions.
3: JIS B 8432 compliance.
4: Operating range is limited in wall/tilted mount (e.g., #1-axis range = 30° for wall mount).
5: Usable at altitudes ≤ 1000m; temperature limits apply above this level.
6: Do not use liquids that deteriorate seals (e.g., solvents, acids, alkalis, chlorine, gasoline-based cutting fluids).
7: Based on internal ISO 14644-1 assessment; install robot in down-flow cleanroom. Clean robot before entering the cleanroom.






REQUEST QUOTATION
PAYMENT

LINK



