Nachi
Nachi SRA Series Spot Welding Robots

Manufacturer: NACHI
Model: SRA series: SRA100/166/210/166L/120EL
Features
World Class Speed Robot
Robot motion makes minimum cycle times unbeatable. Light weight and high rigidity design makes high acceleration and minimum vibration. Maximum speed on all axes reduces cycle time. Improved productivity by these design.
Easy to use
Improved motor drive controls for accurate positioning and repeatability.
Slim and compact design allows closer installation in less floor space.
Improved maintenance item. It can do easy parts replacement and inspection.
Energy saving
Power consumption reduced 15% from existing model by reducing the robot’s weight by 20% and using newest motor drive controls.
Controller
FD11
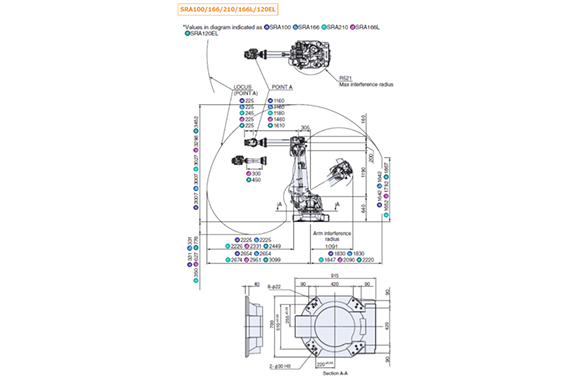
Operating range
The specifications are subject to changes without notice.
In case that an end user uses this product for military purpose or production of weapon, this product may be liable for the subject of export restriction stipulated in the Foreign Exchange and Foreign Trade Law. Please go through careful investigation and necessary formalities for export.
Specification
| Item | SRA100 | SRA166 | SRA210 | SRA166L | SRA120EL |
|---|---|---|---|---|---|
| Structure | Articulated construction | ||||
| Number of axes | 6 | 6 | 6 | 6 | 6 |
| Drive system | AC servo system | ||||
| Max. operating area (rad[°]) | |||||
| J1 (Swivel) | ±3.14 [±180] | ±3.14 [±180] | ±3.14 [±180] | ±3.14 [±180] | ±3.14 [±180] |
| J2 (Back & forth) | +1.05 to -1.40 [+60 to -80] | same | same | same | same |
| J3 (Up & down) | +2.62 to -2.56 [+150 to -146.5] | +2.62 to -2.33 [+150 to -133.4] | +2.62 to -2.33 [+150 to -133.4] | +2.62 to -2.23 [+150 to -127.7] | +2.62 to -2.23 [+150 to -127.7] |
| J4 (Rotation 2) | ±6.28 [±360] | same | same | same | same |
| J5 (Bend) | ±2.36 [±135] | ±2.27 [±130] | ±2.36 [±135] | ±2.36 [±135] | ±2.36 [±135] |
| J6 (Rotation 1) | ±6.28 [±360] | same | same | same | same |
| Max. velocity (rad/s [°/s]) | |||||
| J1 (Swivel) | 2.37 [136] | 2.18 [125] | 2.01 [115] | 2.01 [115] | 1.83 [105] |
| J2 (Back & forth) | 2.36 [135] | 2.01 [115] | 1.83 [105] | 2.01 [115] | 1.83 [105] |
| J3 (Up & down) | 2.36 [135] | 2.11 [121] | 1.97 [113] | 2.11 [121] | 1.97 [113] |
| J4 (Rotation 2) | 4.19 [240] | 3.14 [180] | 2.44 [140] | 3.14 [180] | 2.44 [140] |
| J5 (Bend) | 4.07 [233] | 3.02 [173] | 2.32 [133] | 3.02 [173] | 3.02 [173] |
| J6 (Rotation 1) | 6.31 [351] | 4.54 [260] | 3.49 [200] | 4.54 [260] | 4.54 [260] |
| Payload (kg) | Wrist: 100 Forearm: 45 (max 90) | Wrist: 166 Forearm: 45 (max 90) | Wrist: 210 Forearm: 45 (max 90) | Wrist: 166 Forearm: 45 (max 90) | Wrist: 120 Forearm: 45 (max 90) |
| Allowable static load torque (N·m) | |||||
| J4 (Rotation 2) | 580 | 951 | 1,337 | 951 | 687 |
| J5 (Bend) | 580 | 951 | 1,337 | 951 | 687 |
| J6 (Rotation 1) | 290 | 490 | 720 | 490 | 353 |
| Max. allowable moment of inertia (kg·m²) | |||||
| J4 (Rotation 2) | 60 | 88.9 | 141.1 | 88.9 | 60 |
| J5 (Bend) | 60 | 88.9 | 141.1 | 88.9 | 60 |
| J6 (Rotation 1) | 30 | 45 | 79 | 45 | 30 |
| Max. reach (mm) | 2,654 | 2,674 | 2,951 | 3,099 | 3,099 |
| Position repeatability (mm) | ±0.06 | ±0.06 | ±0.06 | ±0.06 | ±0.06 |
| Installation | Floor mounted | ||||
| Ambient conditions | Temperature: 0 to 45°C Humidity: 20–85% RH (without condensation) Vibration at installation surface: ≤0.5G (4.9m/s²) | ||||
| Robot mass (kg) | 960 | 990 | 990 | 980 | 985 |
Load specification of number 1 arm varies according to wrist load conditions and installation position.
Note that the allowable moment of inertia of wrist varies with the wrist load conditions.
JIS B 8432 compliant.
Permitted height is not higher than 1,000 m above sea level. If used in higher place, permitted temperature is affected by height.




REQUEST QUOTATION
PAYMENT

LINK



