Nachi
Nachi SRA100H/SRA133HL Spot Welding Robots

Manufacturer: NACHI
Model: SRA100H/SRA133HL
Features
Smart Cable Management
Spot welding cables and utility lines are routed through the hollow forearm and wrist for protection, ensuring long life. No surprises from swinging dress cables not modeled in simulation. Minimize interferences, much better than external dress solutions.
World’s Fastest Robot
The best motion control in the class makes cycle times unbeatable. Light weight, highly rigid design robot for high acceleration with minimum vibration. The high speed of all axes provide minimized movement times. Dramatically improves manufacturing productivity.
Controller
FD12
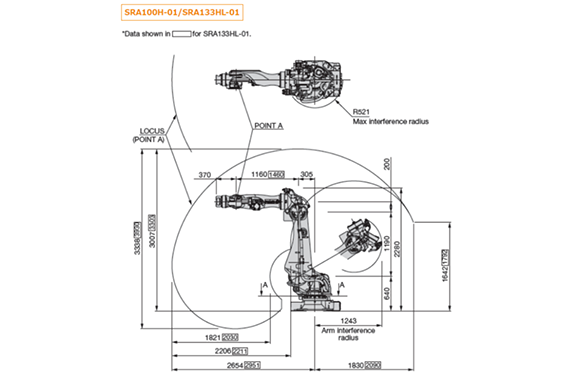
Operating range
 The specifications are subject to changes without notice.
The specifications are subject to changes without notice.
In case that an end user uses this product for military purpose or production of weapon, this product may be liable for the subject of export restriction stipulated in the Foreign Exchange and Foreign Trade Law. Please go through careful investigation and necessary formalities for export.
Specification
| Item | SRA100H-01 | SRA133HL-01 |
|---|---|---|
| Structure | Articulated construction | Articulated construction |
| Number of axes | 6 | 6 |
| Drive system | AC servo system | AC servo system |
| Max. working envelope | ||
| Arm – J1 (Swivel) | ±3.14 rad (±180°) | same |
| Arm – J2 (Horizontal) | -1.40 to +1.05 rad (-80° to +60°) | same |
| Arm – J3 (Vertical) | -2.56 to +2.62 rad (-146.5° to +150°) | -2.33 to +2.62 rad (-133.4° to +150°) |
| Wrist – J4 (Rotation 2) | ±3.66 rad (±210°) | same |
| Wrist – J5 (Bend) | ±2.18 rad (±125°) | same |
| Wrist – J6 (Rotation 1) | ±3.66 rad (±210°) | same |
| Max. speed | ||
| Arm – J1 (Swivel) | 2.18 rad/s (125°/s) | 2.01 rad/s (115°/s) |
| Arm – J2 (Horizontal) | 2.00 rad/s (115°/s) | 1.83 rad/s (105°/s) |
| Arm – J3 (Vertical) | 2.11 rad/s (121°/s) | 1.97 rad/s (113°/s) |
| Wrist – J4 (Rotation 2) | 3.66 rad/s (210°/s) | same |
| Wrist – J5 (Bend) | 3.05 rad/s (175°/s) | same |
| Wrist – J6 (Rotation 1) | 5.41 rad/s (310°/s) | same |
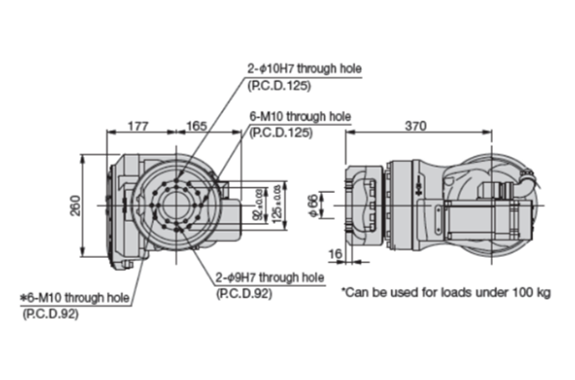
| Payload | Wrist: 100 kg Forearm (*1): 20 kg | Wrist: 133 kg Forearm (*1): 20 kg |
| Allowable static load torque | ||
| J4 (Rotation 2) | 830 N·m | same |
| J5 (Bend) | 830 N·m | same |
| J6 (Rotation 1) | 441 N·m | same |
| *Max. allowable moment of inertia (2) | ||
| J4 (Rotation 2) | 85.0 kg·m² | same |
| J5 (Bend) | 85.0 kg·m² | same |
| J6 (Rotation 1) | 45.0 kg·m² | same |
| Max. reach | 2,654 mm | 2,951 mm |
| *Position repeatability (3) | ±0.06 mm | ±0.06 mm |
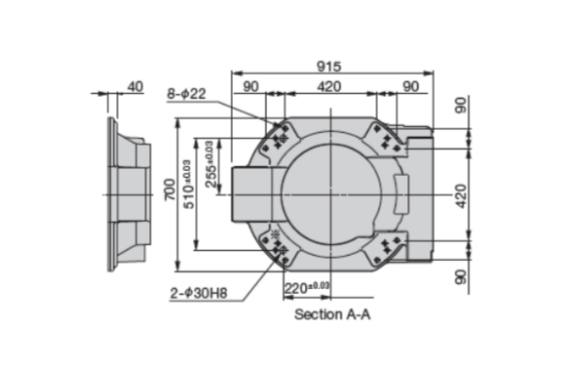
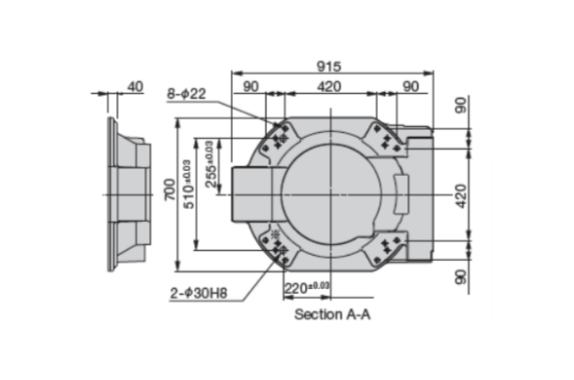
| Installation | Floor mount | Floor mount |
| Ambient conditions | Temperature: 0 to 45°C (*4) Humidity: 20–85% RH (without condensation) Vibration ≤0.5G (4.9 m/s²) | same |
| Weight | 1,040 kg | 1,070 kg |
On controller display, axis 1 to 6 is displayed as J1 to J6 for each.
The specification and externals described in this specifications might change without a previous notice for the improvement.
Explosion proof is not available.
(*1) Load specification of number 1 arm varies according to wrist load conditions and installation position.
(*2) Note that the allowable moment of inertia of wrist varies with the wrist load conditions.
(*3) JIS B 8432 compliant.
(*4) Permitted height is not higher than 1,000 m above sea level. If used in higher place, permitted temperature is affected by height.






REQUEST QUOTATION
PAYMENT

LINK



