Japan, Orientalmotor
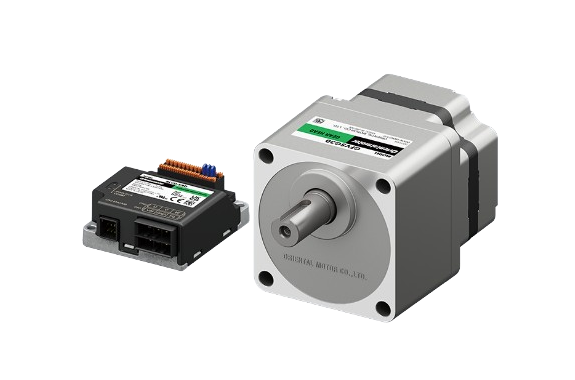
Orientalmotor BLV Series R Type Brushless Motors
Made in Japan
Manufacturer: ORIENTAL MOTOR CO., LTD.
Model: BLV Series R Type
Overview and Applications
2-Minute Explanation of the BLV Series R Type
See the features of the BLV Series R Type in this video.
- Output Power: 60 W, 100 W, 200 W, 400 W
- Compact and Lightweight Drivers
- Power Supply Input: 24~48 VDC
- Also Available With Electromagnetic Brake
Applications
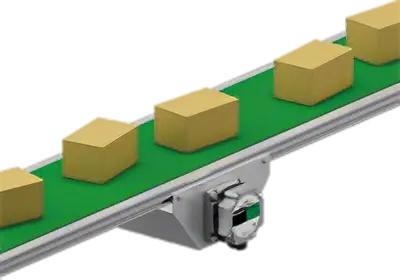
Autonomous Mobile Robot With Belt Conveyor

Low Clearance Transportation Robot

Agitator

Conveyor
Motorized Heads for Security Cameras

Compact, Lightweight, and High Power
Compact and Lightweight Design
Both the motor and the driver are significantly smaller and lighter.
Motor*

- *Parallel Shaft Gearhead 400 W, Gear Ratio: 30
Driver

- For the 24 VDC 400 W type, 160 (W) mm x 110 (D) mm x 35 (H) mm and 0.46 kg mass.
High Power
Capable of driving larger load inertia than conventional products, enabling the transport of heavy loads.
Conditions
| BLV Series R Type Motor | Product Line | Parallel Shaft Gearhead |
|---|---|---|
| Output Power | 400 W | |
| Gear Ratio | 30 | |
| Driving Condition | Wheel Diameter | 150 mm |
| Number of Drive Wheels | 2 | |
| Acceleration Time | 1 sec. |
Result
| Maximum Transportable Mass (Mass of transport robot body + load mass) | 500 kg |
|---|---|
| Maximum Travel Speed | 0.7 m/sec |
- *Calculated using a wheel friction coefficient of 0.1.
Significantly Increased Permissible Load – Flange Drive Adapter (Sold separately) –
Mounting on a parallel shaft gearhead increases permissible radial and axial loads.
Wheels and rotating tables can be directly mounted on rotating mechanisms easily, contributing to reduced design times.
- *Can be used with 100 W output power motor parallel shaft gearheads

Wide Speed Control Range, High Speed Stability
Wide Speed Control Range: 1~4000 r/min
Low speed range from 1 r/min provides stable operation for smoother starts and stops.

Advantages
- Achieves smooth operation even with repeated starts and stops such as when following the motion of a person.
High Speed Stability Ensures Operation at the Speed Set
Speed regulation (load) is as small as ±0.01 %. Operation maintains the set speed even if load magnitude changes.

- *±0.2 % at digital setting
Present Position Acquisition and Positioning Operation Available
Since the motor provides abundant feedback information, the present position can be acquired.
In addition, stops can be set to your desired position through the improved resolution.

- Stopping accuracy during positioning operation is ±0.72° on the motor shaft and 1~2° on the gearhead output shaft.
Improved Usability/Recommended Functions
Expanded Allowable Operating Voltage

Advantages
- 24~48 VDC batteries are compatible.
- Does not stop even when battery voltage deteriorates.
Continuous operation while limiting rotation speed and torque.
Power Consumption Reduced by 10 %

Advantages
- For battery-powered transportation robots, the distance and travel time capabilities are extended.
As a result, batteries can be charged less frequently. - The MEXE02 support software can monitor the power consumption remotely.
This can be used as a guideline for recharging.

Electric Brake Enables Hold During Stops
Holding force is generated in a stopping motor that is excited (servo-on).
Even motors without an electromagnetic brake can be used as an electric holding brake.
There is also a function to hold position so that it does not deviate from the stopping position.
ATL Function Automatically Limits Output Torque
Even if the motor is overloaded, the ATL function attempts to continue operation by reducing the output torque to prevent the motor from stopping due to the overload alarm.
Simplifying the Main Program via Sequence Function
When used during a stored data operation, it comes equipped for a wide variety of sequence functions, such as including linked operation, timer settings for each operation, conditional branches, and loop count.
- Number of stored data settings (up to 256 points)
- Direct I/O signal counts (input 4, output 2)
- Remote I/O signal counts (input 32, output 32)

Communication control possible
BLV Series R-Type is compatible with 2 communication interfaces: Modbus (RTU) and CANopen.

Main Functions Available in Modbus (RTU)
Free Creation of Operation Profiles: Direct data operation
This is an operation method that can simultaneously rewrite data and initiate operations with Modbus (RTU) communication.
| Operation Data Type | Description |
|---|---|
| Operation Mode | Sets the operation mode. |
| Position | Sets the target position. |
| Speed | Sets the operating speed. |
| Acceleration Rate | Sets the acceleration time. |
| Deceleration Rate | Sets the deceleration time. |
| Torque Limiting Value | Sets the torque limiting value. |
Jointly Sending and Receiving Different Data With Each Axis: ID Share Mode
This function improves synchronization between axes through Modbus (RTU) communication.
Communication delay between axes is improved because data can be sent and received jointly through multiple axes.
It is also possible to send different commands to each axis at the same time.
This is our proprietary transmission method.

Support Software Compatible
The MEXE02 support software allows data setting, real drive operations and other various types of monitors to be done via a PC.
Support software can be downloaded from the Oriental Motor website free of charge.
Start-UpA Function for Smooth Equipment Start-up
Simple Settings
“Simple communication settings” can be used to set up each communication type easily.

Enlarge image
Communication Frame Monitor and Communication Status Monitor
Can be used to monitor the frames and status of each communication type.
Can be used for start-up and debugging of host programs.

Enlarge image

Enlarge image
OperationFunctions to help with adjustments
Waveform Monitor
You can check motor operation status (command speed, torque, I/O signals, etc.) like with an oscilloscope.
Waveform readings can be saved as images or in CSV file format.

Enlarge image
FFT Monitor
Mechanical resonances visualization is achieved through frequency analytics using FFT analysis. Sound and vibration can be reduced by adjusting the “resonance suppression parameters.”

Enlarge image
Gain Tuning
The motor’s follow-up in response to commands can be adjusted.

Enlarge image
maintenanceUseful functions for diagnosis and maintenance
Trace Monitor
The operation status of the motor can be continuously monitored for over 24 hours.
Data can be saved in CSV format.

Advantages
- Since data is retained over a long time period, determining the cause of problems is easier.
Various Monitoring Functions
MEXE02 Support Software can also be used for monitoring a variety of other information.
Refer to the page below for details.
Related Products
-

Kanetec LPR-VN+L Section Steel Lifting Permanent Magnetic Lifma
-

Showa Measuring Instruments MMF Special Transducers
-

Murakoshi MY−250XN Three-dimensional Trademark Dust Collector
-

DIJET MGN Series Steel Carbide Shank Arbor Diamate Extreme
-

Kondotec Block For Mackerel Finishing
-

Kimoto Spray nozzle Rubber Products
REQUEST QUOTATION
PAYMENT

LINK



