Nachi
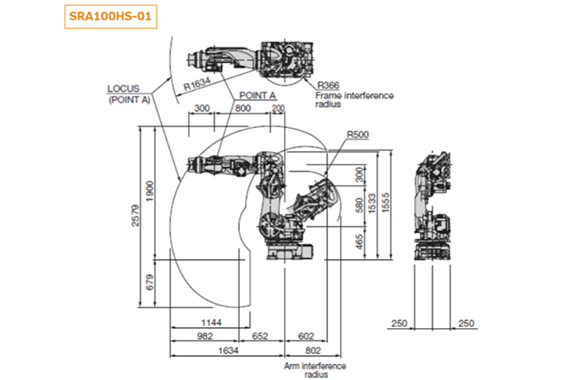
Nachi SRA100HS/SRA100HB Spot Welding Robots

Manufacturer: NACHI
Model: SRA100HS/SRA100HB
Features
Cable built into the hollow arm
Welding cables and hoses packed tightly inside arms with hollow construction.
Avoids interference with peripheral equipment through the displacement of cables.
Improved reliability and safety of cable performance through wrist operations
The embedded welding cables in the arm make the off-line programming easier.
Compact body
Minimized robot height so it can be used in multilevel arrangements
Operating range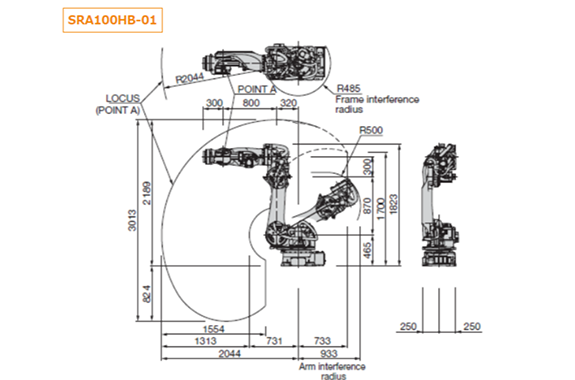
 (*1) The specifications are subject to changes without notice.
(*1) The specifications are subject to changes without notice.
(*2) In case that an end user uses this product for military purpose or production of weapon, this product may be liable for the subject of export restriction stipulated in the Foreign Exchange and Foreign Trade Act. Please go through careful investigation and necessary formalities for export.
Specification
| Item | SRA100HS-01 | SRA100HB-01 |
|---|---|---|
| Structure | Articulated | Articulated |
| Number of axes | 6 | 6 |
| Drive system | AC servo system | AC servo system |
| Max. operating envelope | ||
| J1 (Swivel) | ±3.14 rad (±180°) | ±3.14 rad (±180°) |
| J2 (Horizontal) | -2.09 ~ +1.05 rad (-120° ~ +60°) | -2.09 ~ +1.05 rad (-120° ~ +60°) |
| J3 (Vertical) | -2.18 ~ +1.57 rad (-125° ~ +60°) | -2.64 ~ +1.57 rad (-151° ~ +90°) |
| J4 (Rotation 2) | ±3.66 rad (±210°) | ±3.66 rad (±210°) |
| J5 (Bend) | ±2.18 rad (±125°) | ±2.18 rad (±125°) |
| J6 (Rotation 1) | ±3.66 rad (±210°) | ±3.66 rad (±210°) |
| Max. velocity | ||
| J1 (Swivel) | 2.37 rad/s (136°/s) | same |
| J2 (Horizontal) | 2.00 rad/s (115°/s) | same |
| J3 (Vertical) | 2.79 rad/s (160°/s) | same |
| J4 (Rotation 2) | 3.66 rad/s (210°/s) | 3.93 rad/s (225°/s) |
| J5 (Bend) | 3.05 rad/s (175°/s) | same |
| J6 (Rotation 1) | 5.41 rad/s (310°/s) | 5.50 rad/s (315°/s) |
| Payload | Wrist: 100 kg Forearm (*1): 20 kg | Wrist: 100 kg Forearm (*1): 20 kg |
| Allowable static load torque for wrist | ||
| J4 (Rotation 2) | 830 N·m | 650 N·m |
| J5 (Bend) | 830 N·m | 650 N·m |
| J6 (Rotation 1) | 441 N·m | 315 N·m |
| *Allowable moment of inertia for wrist (2) | ||
| J4 (Rotation 2) | 85 kg·m² | 85 kg·m² |
| J5 (Bend) | 85 kg·m² | 85 kg·m² |
| J6 (Rotation 1) | 45 kg·m² | 45 kg·m² |
| *Position repeatability (3) | ±0.06 mm | ±0.06 mm |
| Installation | Floor | Floor |
| Ambient conditions | Temp: 0 | Same |
| *Noise level (5) | 79.6 dB | – |
| Robot mass | 690 kg | 750 kg |
(*1) This value changes by placement and load conditions of a wrist.
(*2) The allowable moment of inertia of a wrist changes with load conditions of a wrist.
(*3) This value conforms to “JIS B 8432”.
(*4) Permitted height is not higher than 1,000 m above sea level. If used in higher place, permitted temperature is affected by height.
(*5) A-weighted equivalent sound level measured according to JIS Z 8737-1 (ISO 11201) (while operating at maximum speed with rated load).






REQUEST QUOTATION
PAYMENT

LINK



