| Module series | Memory block | Input byte | Output byte |
|---|---|---|---|
| IRDS-SC | 4 | 16 | 16 |
Suntest
Suntest IRDS-SC. Servo Controller Module

Manufacturer: Suntest Co.,Ltd
Model: IRDS-SC
This is a slave module for the servo controller (Simple Adaptive Control) for hydraulic or pneumatic of IRD series.
High accuracy position or load control for hydraulic or pneumatic cylinder can be built up easily.
[Functions and Features]
- The data is transferred to the industrial network through IRD master module. (CC-Link, EtherNet/IP, PROFIBUS)
- Adopting Simple Adaptive Control (SAC) theory among other modern control theories, achieved robust control compensating automatically parameter change and time-variant influence in the plant.
- Servo calculation is 5kHz(Standard) or 20kHz(Option) with inside DSP and it is independent of cycle time of host system.
- As having analogue input ports for feedback and command, it is possible to replace with existing analogue servo system.
- Automatic transfer function : capable of acquiring feedback signal of various sensor from other IRDS slave module directly.
- Capable of switching position control and load control in operation by using 2 pcs of IRDS-SC.
- Alarm : upper and lower limit of sensor, alarm of servo deviation and oscillation
- Self diagnosis function : internal IC error, cable error, sensor data error.
- RoHS compliant
Model
IRDS (1) – SC (2) (3) – (4) (5) (6) – (7)
(1) series
IRDS: IRD slave module
(2) module function
SC : servo controller module
(3) servo calculation cycle
| blank | : 5kHz |
| H | : 20kHz |
(4) command input
| V | : voltage (±10V) |
| I | : current (0~20mA) |
| D | : incremental pulse (line driver) |
| O | : incremental pulse (open collector) |
(5) feedback input
| V | : voltage (±10V) |
| I | : current (0~20mA) |
| D | : incremental pulse (line driver) |
| O | : incremental pulse (open collector) |
(6) servo output
| V | : voltage (±10V) |
| I | : current (±50mA) |
(7) special specifications
| blank | : standard |
| 01 | : current output ±100mA |
| HS | : resin coating for humidity |
| others | : customer’s special option |
Occupied memory block and input / output bytes
Specifications
| Items | IRDS-SC (H) | |
|---|---|---|
| Servo function | number of control axes | one |
| servo calculation cycle | 5kHz (standard) 20kHz (option) | |
| Servo output | output signal* | voltage (±10V) or current (±50mA) |
| resolution of output | -30000~30000 (for full scale) | |
| isolation | Servo output terminal are isolated from power supply and inside circuit. (Not isolated from analogue input terminal.) | |
| Pulse counter function | input type | line driver (EIA-422) or open collector (18V~32V) |
| pulse type | 90°phase difference A/B pulse (multiply by 4) CW/CCW, STEP/DIR | |
| response frequency | 1MHz | |
| counter size | signed integer 32 bit (-2, 147, 483, 648~2, 147, 483, 647) | |
| Analogue input function | input signal | voltage:±10V (200kΩ) current:±20mA (240kΩ) |
| max. rating input | voltage:±10.5V, current:±21mA | |
| resolution of input | -30000~30000 (for full scale) | |
| input updating cycle | 50μsec (internal calculation, the transfer to IRDM is depending on IRD cycle time) | |
| isolation | The inside circuit is isolated from power supply by Digital Isolator. bipolar optocoupler input | |
| External input | rating | bipolar optocoupler input:24V (18~32V) internal load:3kΩ |
| External output | rating | photo relay output:24V max. 32V (0.05A) ON : max. 10kΩ |
| Power supply | rating | DC24V (±10%) 130mA supplied from IRDM (master module) |
※servo output voltage (±10V) : load resistance : more than 1kΩ
servo output current (±50mA) : load resistance : 80Ω Max @ 50mA / 100Ω Max @ 40mA / 150Ω Max @ 30mA / 200Ω Max @ 20mA / 30Ω Max @ 100mA(in case of 100mA output option)
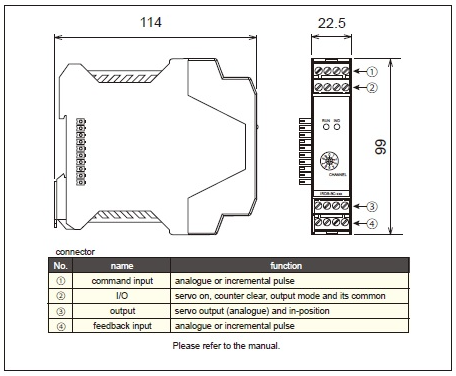
Dimensions
System configuration
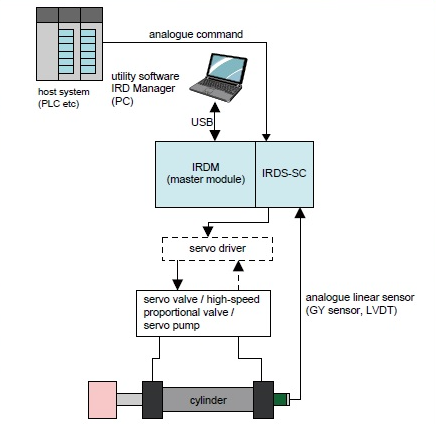
System block of position control
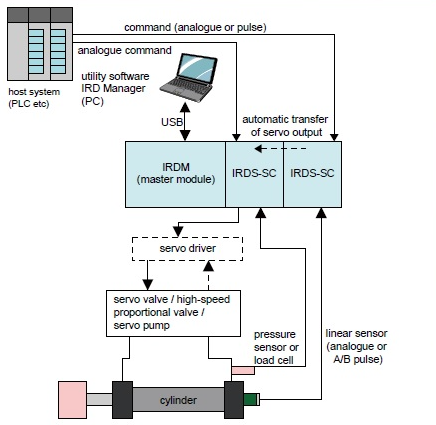
System block of switching control of position and load
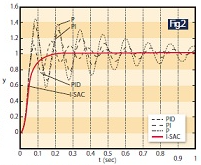
The performance of Simple Adaptive Control (SAC)
Controlled performance Fig.1 shows an example of a step response of PID and I-SAC servo controller in case of setting target value to one in a typical cylinder positioning control system. While any PID control has an overshoot and reaching the target in an oscillating mode, I-SAC is realizing a smooth and fast response without any oscillations due to its proprietary high-gain feedback. As to the steady-state error, I-SAC can make it totally zero because of its integration compensation feature.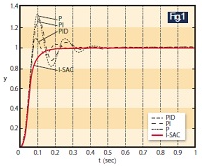
Robustness against variance of circumstances Fig.2 shows that we gave a three times larger mass than in Fig.1 to the cylinder while maintaining same parameters for the controllers. As you can see from the figure, the response is unacceptably oscillatory in case of PID control, which requires re-adjustment of controller parameters by plant engineers. On the other hand, I-SAC provides an excellent robust performance due to its adaptive control structure.
You can check demonstration video of “switching position and load control of pneumatic cylinder” and “the performance comparison of the difference between PID and I-SAC” on our homepage.






REQUEST QUOTATION
PAYMENT

LINK



